Урок 33. Обучаем Arduino робота ездить по линии
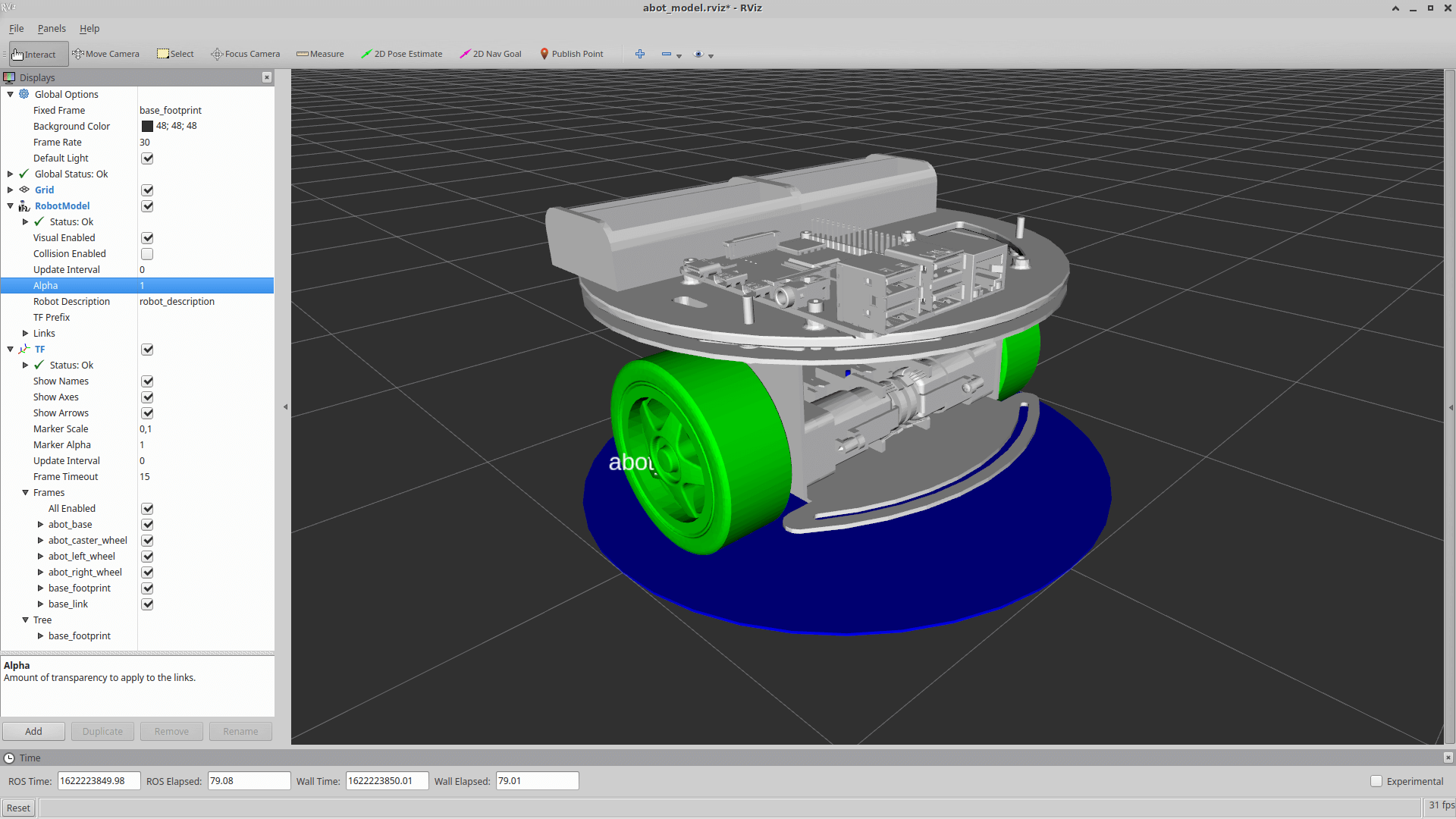
В прошлой части проекта мы создали шасси мобильного робота на ROS и запрограммировали управление движением. А ещё через плагин неудобно поворачивать роботом во время движения. Нам нужно удобное дистанционное управление роботом. В будущем наш робот будет ездить самостоятельно. Однако нам всё равно понадобится ручное дистанционное управление.








Для ориентации робота в пространстве используются различные контактные и бесконтактные сенсоры. В этой статье я хочу описать свой опыт изготовления и использования инфракрасного ИК датчика препятствия для своего первого самоходного робота, которого я собирал детям для развлечения. Забегая вперед предлагаю посмотреть видео. На видео представлен мой первый автономный робот, который ориентируется в пространстве при помощи ИК сенсоров.
- Какие бывают датчики для Arduino и Raspberry Pi?
- В этой статье мы на подробном примере расскажем о том, как построить настоящего робота целиком на инфракструктуре ROS. Это будет наш первый простой робот со своей операционной системой и первый опыт работы с ROS.
- Кобот или коллаборативный робот — это робот, который может хорошо исполнять монотонную и рутинную работу вместе с человеком.
- Всем привет!
- 9.3. Датчики
- Вероятно это не особо важно, у нас I2C работает даже совсем без резисторов.
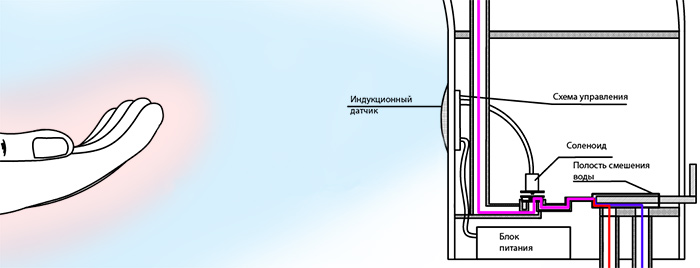
- Изучая Arduino самое интересное, что можно сделать после мигания светодиодами, подключения потенциометра, кнопки, двигателя и др. Датчики позволяют определять, что происходит во внешней среде, и действовать на основе этой информации.
- Распределенный сенсор внутри оболочки обладает различными измерительными свойствами. Такие датчики можгут окутывать поверхность практически любого объекта.











Сенсорика роботов система чувствительных датчиков обычно копирует функции органов чувств человека: зрение, слух, обоняние, осязание и вкус. Чувство равновесия и положения тела в пространстве, как функция внутреннего уха, иногда считаются шестым чувством. Функционирование биологических органов чувств базируется на принципе нейронной активности, в то время как чувствительные органы роботов имеют электрическую природу.